Neil Lambeth, de Red Robotics a récemment publié sa première carte contrôleur de moteur pour le Raspberry Pi. « Oh, pas un autre! » Je t’entends pleurer… Eh bien, tiens-toi là – c’est une chose à laquelle il faut faire attention et ce n’est pas ridiculement cher non plus.
TL; DR – Juste achetez-en un si vous aimez la robotique – c’est fantastique!
Capacités
À 30 £ / 38 $, le RedBoard + est une carte contrôleur de la taille d’un HAT et c’est juste emballé avec des fonctionnalités:
- Il prend une entrée de batterie de 7V-24V et a une protection contre les inversions de polarité.
- Il alimente le Pi avec une alimentation stable de 5,2 V, 3 A, ce qui signifie qu’il s’adaptera à un Pi 4, si nécessaire.
- Il a un régulateur de 3,3 volts 800mA.
- Il peut contrôler deux ensembles de moteurs à courant continu avec deux ponts en H à bord, capables de gérer 6 A par canal (12 A au total!). Il s’agit d’un contrôleur robuste.
- Il dispose d’un levier de changement de niveau 5V à 4 canaux pour piloter des néopixels, des DotStars ou d’autres appareils électroniques 5V.
- Il répartit trois canaux d’un convertisseur analogique-numérique (un canal est utilisé pour la surveillance de la batterie)
- Il possède une LED RGB intégrée utilisée pour tout ce que vous aimez, mais plus utile comme voyant d’avertissement de batterie et / ou Clignotant IP (les deux scripts sont inclus sur le référentiel de code).
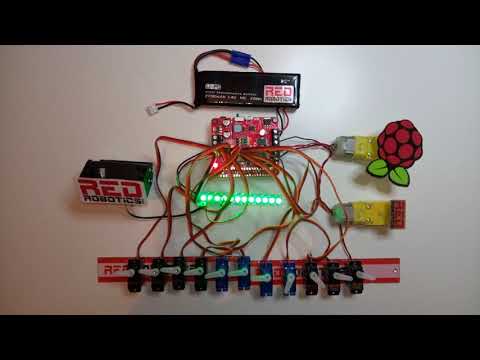
- Il peut directement piloter jusqu’à douze servos de loisirs (avec une alimentation séparée pour les gros servos de «robot»).
- Il dispose d’un bouton programmable par l’utilisateur qui est mieux utilisé, tel qu’il est fourni, pour arrêter ou redémarrer votre Pi avec différents temps de maintien.
- Un réel interrupteur pour acheminer la puissance de la batterie vers le Pi et les moteurs.
- Quatre canaux I2C répartis sur les en-têtes.
- En-têtes pour la communication série (RX & TX).
- Plusieurs broches de mise à la terre et d’alimentation.
- Un «en-tête vraiment utile» sur lequel vous pouvez brancher un écran OLED en option (mais pas encore disponible) – cela s’est avéré très pratique, alors merci Neil d’en avoir inclus un dans mon pack de révision!

Utilisation du tableau
J’ai un robot sur lequel je travaille depuis des lustres avec quatre puissants moteurs 12V et un châssis en bois. Il utilise normalement une autre carte contrôleur de moteur, mais il constitue une plate-forme de test idéale pour le RedBoard +. Le voici en action (merci à la femme d’avoir fait l’enregistrement!):

J’ai utilisé une batterie rechargeable AA 10 x 1,2 V pour alimenter le Pi et les moteurs ensemble, via le RedBoard +. Pour commencer, le Pi a continué à redémarrer et je me suis demandé pourquoi … Panic s’installe! Mais il s’avère que les piles que j’utilisais n’étaient… pas très bonnes. Neil avait souligné que cela pouvait être le problème au début, mais j’ai passé quelques bonnes heures dans le déni avant de passer à certaines batteries Eneloops / Amazon Basics (après quoi le problème a miraculeusement disparu!) Leçon apprise: utilisez toujours de bonnes piles. Cela fonctionnera également avec les batteries LiPo, mais je ne suis pas si courageux… pour le moment! Il y a même un script de test dans le référentiel GitHub qui surveille la puissance de la batterie, réglé pour LiPos.
Pour référence, les piles AA incriminées étaient celles-ci (piles EBL que j’ai obtenues via Amazon):

Les choses de Blummin! En tous cas!
Tout ce temps pour tester les choses m’a permis de coder un script pour contrôler le robot, avec l’aide des scripts de test originaux de Neil et d’un programme que j’avais écrit (pour cet autre contrôleur de moteur) qui utilisait Bibliothèque approxeng.input de Tom Oinn (si vous n’avez pas essayé et que vous êtes amateur de robotique, essayez-le – il est charmant et compatible avec de nombreux contrôleurs de jeux différents.
Code et scripts
Le contrôleur est livré avec un référentiel GitHub contenant une bibliothèque simple à utiliser et divers scripts de test. Celles-ci ont contribué à essayer la carte contrôleur et à diagnostiquer le problème de la batterie. Si vous êtes vraiment bloqué et que vous ne voulez pas installer le logiciel vous-même, il y a même une image de carte SD liée à partir de la page GitHub. Neil a vraiment réfléchi à l’expérience utilisateur. Le code qu’il a publié fonctionne à la fois avec Python 3 (Dieu merci) et Python 2 (frisson).
Je n’ai pas encore mis à l’épreuve les capacités des servos, mais si vous regardez au bas de ce billet de blog, vous verrez un exemple de carte utilisant des servos ainsi que des moteurs à courant continu.
Conclusion
Il y a un lot des contrôleurs de moteur là-bas, certains plus capables que d’autres. Si vous voulez une carte contrôleur qui fait plus que «simplement faire fonctionner quelques moteurs», je recommande vivement le RedBoard +. Il est bon sur le prix, fantastique sur la fonctionnalité et suinte juste l’utilité. Utilisez les bonnes batteries – certaines ne sont tout simplement pas assez bonnes pour faire fonctionner le Pi de manière fiable – utilisez les batteries rechargeables Eneloops ou Amazon Basics ou IKEA (qui semblent toutes être la même unité de base).
Autrement dit: si je devais retourner cette unité d’examen (je ne le fais pas), j’en achèterais une en un clin d’œil. Quand on considère la complexité des compétitions de robotique comme Pi Wars et la nécessité de faire fonctionner plus de deux moteurs à courant continu à basse vitesse, un contrôleur qui peut gérer une large plage d’entrée, peut fournir une haute page aux moteurs et peut également gérer des servos (y compris des servos haute puissance) en même temps, RedBoard + est ce dont vous avez besoin.
Vous pouvez acheter un RedBoard + de Tindie.
Bit final
Je vous laisse avec cette vidéo de démonstration, tournée par Neil lui-même. Il montre toutes les fonctionnalités utilisées!