
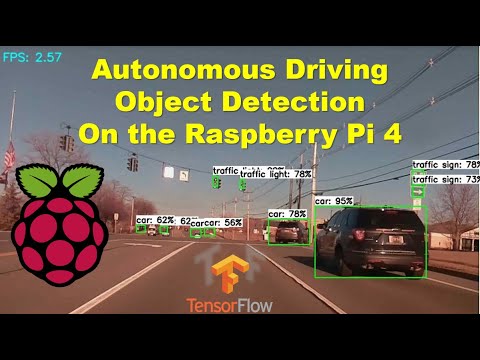
Ethan Dell est un ingénieur en vision par ordinateur à plein temps qui aime développer et expérimenter le Raspberry Pi. Il a documenté une excellente méthode d’utilisation du Pi (dans ce cas, un Raspberry Pi 4) pour faire la détection d’objets lors de la conduite à grande vitesse. Il a accompli cela en utilisant OpenCV, ce qu’on appelle «l’apprentissage en profondeur» et TensorFlow Lite avec Python pour prendre des photos à partir d’un module de caméra et identifier les objets de la circulation routière tout en conduisant. Juste pour garder les choses réelles, il a tout attaché à une boîte de mouchoirs vide, prouvant que vous n’avez pas besoin d’un étui compliqué pour y entrer. Les résultats sont exceptionnels et vous pouvez voir comment la détection s’améliore à mesure que les objets se rapprochent du chauffeur.
Vous pouvez lisez un tutoriel sur la façon de le faire sur GitHub ici, voir un aperçu plus approfondi de la méthodologie «d’apprentissage» ici et vous pouvez également en apprendre davantage sur le projet et voir les résultats en regarder la vidéo au dessous de.
Cherchez plus d’Ethan dans le futur sur son blog, qu’il vient de démarrer et qui grandira à mesure que ses expériences avec le Pi se développeront.